
Управление arduino через android. Управление машинкой через WiFi с помощью ESP8266 NodeMCU
Добрый день!
Недавно заинтересовался идеей создания «умного дома». Так как из необходимых компонентов в моем распоряжении пока что имеются только arduino и телефон на андроиде, решено было начать с создания пульта управления и связи его с остальной частью системы.
Моё видение системы выглядит так:
Думаю стоит совместить домашний и веб-серверы, прикупив статический айпишник, но на первое время сойдет и так. Начнем с простого – научимся удаленно управлять светодиодом и LCD-дисплеем.
Web-server
На веб-сервере создаем БД с двумя таблицами – leds и texts. Таблица leds содержит 2 поля – id и status. Она содержит одну запись с актуальным состоянием светодиода. Таблица texts содержит 2 поля – id и text. Она также содержит одну запись с текстом, который в данный момент отображается на LCD-дисплее.Теперь напишем пару скриптов, которые будем вызывать с телефона и передавать информацию для БД. Пишем на php.
Скрипт led.php (управление светодиодом):
Скрипт msg.php (управление LCD-дисплеем):
Я думаю, что из комментариев ясно, как работают эти скрипты. Это все, что находится на веб-сервере. Теперь перейдем к домашнему серверу (или говоря проще, компьютеру, к которому подключен ардуино).
Домашний сервер
На нем будет постоянно работать программка (можно даже назвать ее – демон), посылающая запросы к БД и при изменении находящейся там информации, посылающая на COM-порт с ардуино соответствующую команду. Программку напишем на языке Processing:Import processing.serial.*; //библиотека для работы с COM-портом
import de.bezier.data.sql.*; //библиотека для работы с БД MySQL
Serial port;
MySQL dbconnection;
int prevLEDState = 0; //предыдущее состояние светодиода
String prevS = ""; //предыдущий текст, отпаврленный на LCD-дисплей
void setup()
{
port = new Serial(this, "COM4", 9600); //инициализируем COM-порт 4 (на не прицеплена ардуина), скорость обмена - 9600 бод
port.bufferUntil("\n");
String user = "имя_пользователя";
String pass = "пароль";
String database = "имя_бд";
dbconnection = new MySQL(this, "ваш_домен.ru", database, user, pass); //соединяемся с БД
dbconnection.connect();
}
void draw()
{
//следим за информацией о светодиоде в БД
dbconnection.query("SELECT * FROM leds WHERE id = "1""); //делаем запрос к таблице leds
while (dbconnection.next()) //обходим выборку из результата запроса
{
int n = dbconnection.getInt("status"); //получаем значение из поля status
if (n != prevLEDState) //если оно изменилось по сравнению с предыдущем "тактом" работы программы, то посылаем команду на COM-порт
{
prevLEDState = n;
port.write("1"); //первый переданный символ будет означать код выполняемой операции: 1 - управление светодиодом, 2 - управление LCD-дисплеем
port.write(n);
}
}
//следим за информацией о LCD-дисплее в БД
dbconnection.query("SELECT * FROM texts WHERE id = "1""); //делаем запрос к таблице texts
while (dbconnection.next())//обходим выборку из результата запроса
{
String s = dbconnection.getString("text"); //получаем значение из поля text
if (s != prevS)
{
prevS = s;
port.write("2");
port.write(s);
}
}
delay(50); //делаем задержку в 50 мс, чтобы не слать запросы непрерывно
}
Пояснять этот код я тоже не стану, все и так понятно.
Еще 1 важный момент. Чтобы программа с нашего компьютера могла обращаться к БД, расположенной на удаленном сервере, надо это разрешить. Вводим наш ip в список разрешенных:
Приложение для телефона
Телефон у меня андроиде, для него и пишем. Не буду сильно вдаваться в подробности (очень хорошо как о установке среды программирования, так и о написании первого приложения написано вот в этой статье - ссылка).Внешний вид приложения выглядит довольно скромненько, но в данном случае это не главное:
Приведу только отрывки кода программы под Android. Функция, вызывающая скрипт, управляющий светодиодом:
public void changeLED()
{
try
{
URL url1 = new URL("http://ваш_домен.ru/led.php");
HttpURLConnection urlConnection = (HttpURLConnection) url1.openConnection();
try {
InputStream in = new BufferedInputStream(urlConnection.getInputStream());
}
finally {
urlConnection.disconnect();
}
}
catch (Exception e)
{
}
}
Функция, отсылающая текст для отображения на LCD-дисплее:
public void submitMsg()
{
final EditText tt = (EditText) findViewById(R.id.editText1);
try
{
URL url1 = new URL("http://ваш_домен.ru/msg.php?msg="+tt.getText());
HttpURLConnection urlConnection = (HttpURLConnection) url1.openConnection();
try {
InputStream in = new BufferedInputStream(urlConnection.getInputStream());
}
finally {
urlConnection.disconnect();
}
}
catch (Exception e)
{
}
}
Ну и главная функция, в которой происходит привязка обработчиков событий к кнопкам:
public void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
setContentView(R.layout.main);
final Button btn1 = (Button) findViewById(R.id.button1);
btn1.setOnClickListener(new Button.OnClickListener() {
public void onClick(View v) // клик на кнопку
{
changeLED();
}
});
final Button btn2 = (Button) findViewById(R.id.button2);
btn2.setOnClickListener(new Button.OnClickListener() {
public void onClick(View v) // клик на кнопку
{
submitMsg();
}
});
}
И еще один важный момент – добавить разрешение приложению на выход в интернет. Для этого в файл AndroidManifest.xml (он находится в директории нашего андроид-приложения) надо добавить строчку:
Экспортируем наше приложение в файл APK и устанавливаем на телефон. Пульт управления умным домом готов!
Arduino
Ну и наконец последнее, но не по значению – подключение ардуино и ее прошивка. Схема подключения LCD-экрана и светодиода к Arduino Uno выглядит следующим образом:
Резистор берем на 220 Ом. Более подробно про подключение LCD-экрана можно прочитать здесь - ссылка
А вот как это все выглядит в реальности:
Правда красиво?
Задача ардуино состоит в прослушивании того, что программа-демон на домашнем сервере посылает на COM-порт, к которому и подключена ардуино (хотя фактически подключение идет по USB-кабелю, но компьютер распознает его как последовательный порт). После получения каких-либо данных с компьютера, контроллер по первому символу переданной информации распознает код команды (т.е. чем сейчас предстоит управлять – LCD-дисплеем или светодиодом). Далее в зависимости от кода и следующей за ним информации выполняется либо включение/выключение светодиода, либо вывод на дисплей переданного сообщения. Итак, вот собственно код:
#include
Я думаю, пояснений он не требует, так как я очень подробно все расписал в комментариях. Единственное, что стоит отметить, так это некоторые ограничения на передаваемые для вывода на дисплей строки. Они не должны содержать пробелов (это ограничение накладывается несовершенством моего алгоритма) и не должны содержать кириллицы (т.к. она поддерживается не всеми дисплеями, а если и поддерживается, то требует передачи кодов символов в своей собственной кодировке, преобразовывать символы в которую нет никакого желания).
Заключение
Ну вот и все. Оказалось, что это довольно просто.Видео того как все работает:
Канал Science Vetal показал, как сделать машинку на управлении практически от любого андроид смартфона. При этом не будем использовать «Arduino», возьмем микроконтроллер от китайского производителя «Espressive» «esp 8266», штуковина представляет из себя «Arduino» плюс wi-fi модуль.
Все радиодетали и модули в этом китайском магазине .
Вы помните «Arduino uno», оно большое, а здесь маленькая такая штучка, в которой есть wi-fi, возможности «Arduino». К этому микроконтроллеру китайцы разработали такой shield. Он удобный: можно подключить 2 двигателя, или даже 4, при этом можно использовать 11 выводов. Так же возьмем 2 двигателя, 2 стандартных «Arduino» колеса.

Когда на «aliexpress» вводишь «Arduino» в поиск, открываются не только платы, но, сопутствующие товары. Интересные элементы, обязательно что-то интересное найдете, попробуйте.
Возьмём для питания 2 аккумулятора 18650, к ним бокс для 2-х акб, также возьмем 2 уголка, размеры около 5 дюймов, это не столь важно там плюс-минус полдюйма, дюйм. Дело в том, что конструкция может быть ваша, но представленная в ролике авторская удачна, проста.
Берем 2 уголка, при помощи винтов их необходимо соединить, чтобы сюда спокойно помещался shield. Сверлом, диаметр которого 3 мм, делаем 4 отверстия. Берем малюсенькие винты, зажимаем, соединяем эту конструкцию. Такая штуковина получается, прочности данного соединения для такой машинки, как делаем, предостаточно.
Сбоку для вала видео сверлим отверстие диаметром 8 мм, получается конструкция, но необходимо еще сделать 3 отверстия диаметром 3 мм: одно для этого выступа, для этих отверстий крепежных еще 2.
Берем, подставляем таким способом, закручиваем с помощью винтов. Один из идеальных случаев, машинка нравится, сюда нечего добавить, ее незачем переделывать. Делаем отверстия для крепления платы.
Ничего не меняем, кроме как тут, где стоит галочка, выбираем адрес к файлу, который будем заливать, затем выбираем нужный com port, нажимаем кнопочку start. Также под видео есть ссылка на программу, которую нужно установить на ваш любимый android.
Закрепил эту плату, вставляем микроконтроллер. Подключаем провода от двигателей, смотрим, если нижний будет «A-», то с этой стороны «B-» будет верхний. Настало время прикрепить колеса. Делается это легко, так как колёса двигателей – это комплект. В этом месте сверлим отверстие диаметром 4 мм, вставляем винт. Делаем такую нехитрую операцию, регулируем высоту, даже еще ниже можно, что-то получился винт, который сильно торчит. Это лишнее. Это получается, устройство дороже на копеечки, что нам, в общем-то, не нужно, как-то оно выглядит коряво.
Так посмотрим, как получается устройство, которое будет управляться андроидом на расстоянии через wifi. Конечно, получше штука. Отсек для аккумуляторов прикрепим термоклеем, машинка получается.
Вставляем аккумуляторы, необходимо быть внимательным, так как бывает часто так, что все вроде бы правильно собрал, вставил аккумуляторы, а устройство не работает. Оказывается, что эти черные пластиковые боксы. Они не дают акб встать на место.
Программа и скетч http://bbs.smartarduino.com/showthread.php?tid=2013
Приложение для управления https://play.google.com/store/apps/details?id=com.doit.carset
Микросхема ESP8266 – один из самых популярных инструментов для организации беспроводной связи в проектах умного дома. С помощью беспроводного контроллера можно организовывать связь по интерфейсу WiFi, обеспечивая проектам Arduino выход в интернет и возможность дистанционного управления и сбора данных. На основе ESP8266 созданы такие популярные платы как WeMos и NodeMcu, а также огромное количество самодельных проектов. В этой статье, мы узнаем, что из себя представляет ESP82266, какие бывают ее разновидности, как работать с ESP8266 в среде Arduino IDE.
ESP8266 – микроконтроллер с интерфейсом WiFi, который имеет возможность исполнять программы из флеш-памяти. Устройство было выпущено в 2014 году китайской фирмой Espressif и практически сразу же стало популярным.
Контроллер недорогой, обладает небольшим количеством внешних элементов и имеет следующие технические параметры:
- Поддерживает Wi-Fi протоколы 802.11 b/g/n с WEP, WPA, WPA2;
- Обладает 14 портами ввода и вывода, SPI, I2C, UART, 10-бит АЦП;
- Поддерживает внешнюю память до 16 МБ;
- Необходимое питание от 2,2 до 3,6 В, потребляемый ток до 300 мА в зависимости от выбранного режима.
Важной особенностью является отсутствие пользовательской энергонезависимой памяти на кристалле. Программа выполняется от внешней SPI ПЗУ при помощи динамической загрузки необходимых элементов программы. Доступ к внутренней периферии можно получить не из документации, а из API набора библиотек. Производителем указывается приблизительное количество ОЗУ – 50 кБ.
Особенности платы ESP8266:
- Удобное подключение к компьютеру – через USB кабель, питание от него же;
- Наличие встроенного преобразователя напряжения 3,3В;
- Наличие 4 Мб флеш-памяти;
- Встроенные кнопки для перезагрузки и перепрошивки;
- Все порты выведены на плату на две гребенки с шагом 2,5 мм.
Сферы применения модуля ESP8266
- Автоматизация;
- Различные системы для умного дома: Беспроводное управление, беспроводные розетки, управление температурой, дополнение к сигнализационным системам;
- Мобильная электроника;
- ID метки;
- Детские игрушки;
- Mesh-сети.
Распиновка esp8266
Существует огромное количество разновидностей модуля ESP8266. На рисунке представлены некоторые из них. Наиболее популярным вариантом является ESP 01.

Исполнение программы требуется задавать состоянием портов GPIO0, GPIO2 и GPIO15, когда заканчивается подача питания. Можно выделить 2 важных режима – когда код исполняется из UART (GPIO0 = 0, GPIO2 = 1 и GPIO15 = 0) для перепрошивки флеш-карты и когда исполняется из внешней ПЗУ (GPIO0 = 1, GPIO2 = 1 и GPIO15 = 0) в штатном режиме.
Распиновка для ESP01 изображена на картинке.
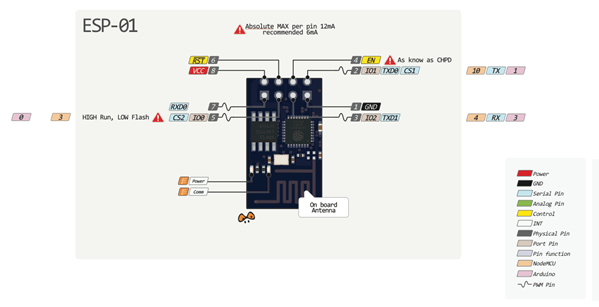

Описание контактов:
- 1 – земля, 8 – питание. По документации напряжение подается до 3,6 В – это важно учесть при работе с Ардуино, на которую обычно подают 5 В.
- 6 – RST, нужна для перезагрузки микроконтроллера при подаче на него низкого логического уровня.
- 4 – CP_PD, также используется для перевода устройства в энергосберегающий режим.
- 7 и 0 – RXD0 и TXD0, это аппаратный UART, необходимый для перепрошивки модуля.
- 2 – TXD0, к этому контакту подключается светодиод, который загорается при низком логическом уровне на GPIO1 и при передаче данных по UART.
- 5 – GPIO0, порт ввода и вывода, также позволяет перевести устройство в режим программирования (при подключении порта к низкому логическому уровню и подачи напряжения) .
- 3 – GPIO2, порт ввода и вывода.
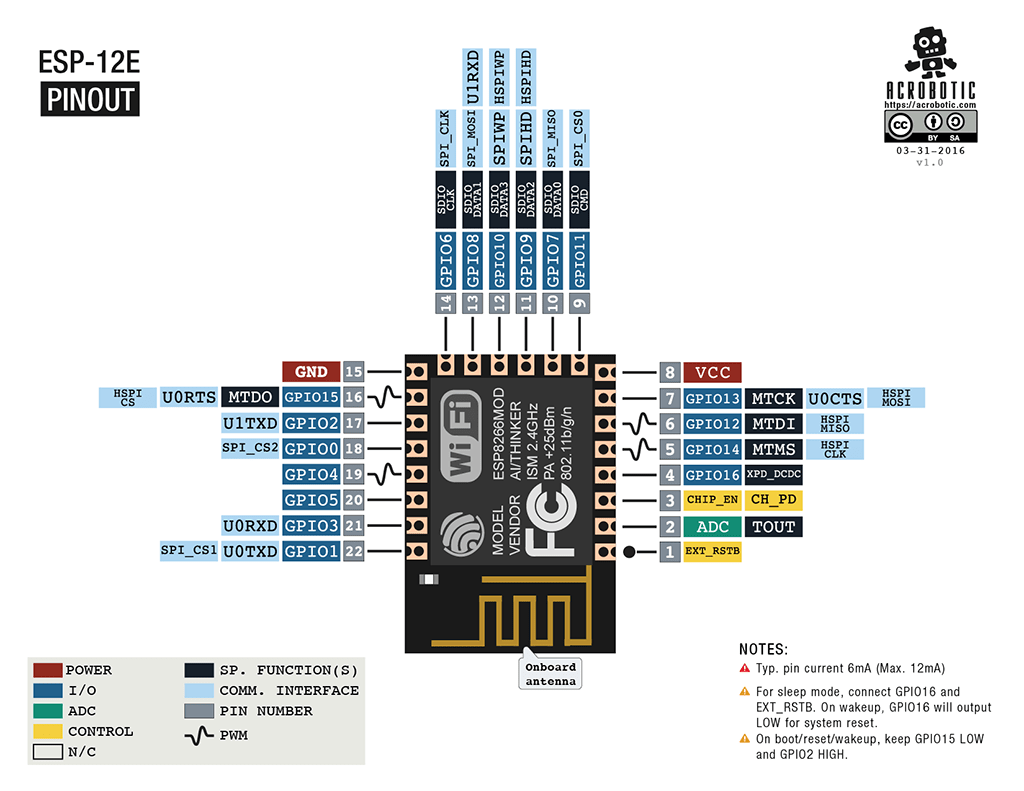
Распиновка ESP-12
Основные отличия Ардуино от ESP8266
- ESP8266 имеет больший объем флеш-памяти, при этом у ESP8266 отсутствует энергонезависимая память;
- Процессор ESP8266 быстрее, чем у Ардуино;
- Наличие Wi-Fi у ESP8266;
- ESP8266 потребляеn больше тока, чем для Ардуино;
Программирование ESP8266 в Arduino IDE
Программный комплект разработчика esp8266 включает в себя:
- Компилятор из пакета GNU Compiler Collection.
- Библиотеки, стеки протоколов WiFi, TCP/IP.
- Средство загрузки информации в программу контроллера.
- Операционная IDE.
Изначально модули ESP8266 поставляются с прошивкой от фирмы-изготовителя. С ее помощью можно управлять модулем с внешнего микроконтроллера, реализовывать работу с Wi-Fi как с модемом. Также существует множество других готовых прошивок. Некоторые из них позволяют настраивать работу модуля при помощи WEB-интерфейса.
Можно программировать из среды Arduino IDE. При ее помощи можно легко писать скетчи и загружать их в ESP8266, прошивать ESP8266, при этом не требуется сама плата Ардуино. Arduino IDE поддерживает все виды модулей ESP8266.
В настоящий момент для ESP8266 можно реализовать следующие функции:
- Основные функции языка Wiring. Управлять портами GPIO можно точно так же, как и пинами на плате Ардуино: pinMode, digitalRead, digitalWrite, analogWrite. Команда analogRead(А0) позволяет считать значения АЦП. При помощи команды analogWrite (pin, value) можно подключить ШИМ на нужном выходе GPIO. При value=0 ШИМ отключается, максимальное значение достигает константы, равной 1023.С помощью функций attachInterrupt, detachInterrupt можно выполнять прерывание на любом порте GPIO, кроме 16.
- Тайминг и delay. Используя команды millis и micros можно вернуть мс и мкс, которые прошли с момента старта. Delay позволяет приостановить исполнение программы на нужное время. Также функция delay(…) позволяет поддерживать нормальную работу Wi-Fi, если в скетче присутствуют большие элементы, которые выполняются более 50 мс. Yield() – аналог функции delay(0).
- Serial и Serial1 (UART0 и UART1). Работа Serial на ESP8266 аналогична работе на ардуино. Запись и чтение данных блокируют исполнение кода, если FIFO на 128 байт и программный буфер на 256 байт заполнены. Объект Serial пользуется аппаратным UART0, для него можно задать пины GPIO15 (TX) и GPIO13 (RX) вместо GPIO1(TX) и GPIO3(RX). Для этого после функции Serial.begin(); нужно вызвать Serial.swap();. Аналогично Serial1 использует UART1, который работает на передачу. Необходимый пин для этого GPIO2.
- Макрос PROGMEM. Его работа аналогична работе в Ардуино. Позволяет перемещать данные read only и строковые постоянные во flash-память. При этом в ESP8266 не сохраняются одинаковые константы, что приводит к дополнительной трате флеш-памяти.
- I2C. Перед началом работы с шиной I2C выбираются шины с помощью функции Wire.pins(int sda, int scl).
- SPI, OneWire – поддерживаются полностью.
Использование esp8266 для связи Ардуино по WiFi
Перед подключением к Ардуино важно помнить, что у ESP8266 напряжение питания не может быть выше 3,6, в то время как на пате Ардуино напряжение равно 5 В. Соединять 2 микроконтроллера нужно с помощью резистивных делителей. Перед подключением модуля нужно ознакомиться с распиновкой выбранного ESP8266. Схема подключения для ESP8266-01 представлена на рисунке.
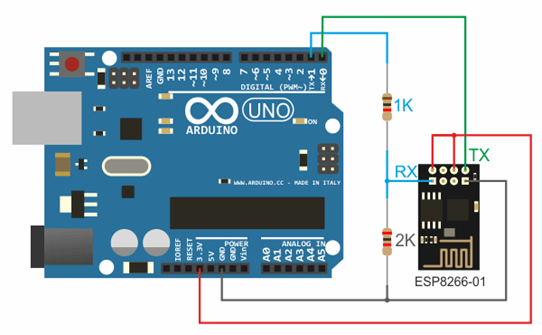
3,3 В с Ардуино – на Vcc&CH_PD на модуле ESP8266, Земля с Ардуино – к земле с ESP8266, 0 – TX, 1 – RX.
Для поддержки стабильной работы ESP8266 необходим источник постоянного напряжения на 3,3 В и максимальный ток 250 мА. Если питание происходит от конвертера USB-TTL, могут происходить неполадки и сбои в работе.
Работа с библиотекой Wi-Fi для ESP8266 схожа с библиотекой для обыкновенного шилда. Имеется несколько особенностей:
- mode(m) – для выбора одного из трех режимов: клиент, точка доступа или оба режима единовременно.
- softAP(ssid) – нужен для создания открытой точки доступа.
- softAP(ssid, password) – создает точку доступа с паролем, который должен состоять не менее чем из 8 знаков.
- WiFi.macAddress(mac) и WiFi.softAPmacAddress(mac)– определяет МАС адрес.
- WiFi.localIP() и WiFi.softAPIP() – определение IP адреса.
- printDiag(Serial); – позволят узнать данные о диагностике.
- WiFiUDP – поддержка передачи и приема multicast пакета в режиме клиента.
Работа выполняется по следующему алгоритму:
- Подключение USB-TTL к USB и к ESP.
- Запуск Arduino IDE.
- Выбрать в меню инструменты нужный порт, плату, частоту и размер flash-памяти.
- Файл - Примеры - ESP8266WiFi - WiFiWebServer.
- Записать в скетче SSID и пароль сети Wi-Fi.
- Начать компиляцию и загрузку кода.
- Дождаться окончания процесса прошивки, отсоединить GPIO0 от земли.
- Поставить скорость 115200.
- Произойдет подключение, будет записан адрес IP.
- Открыть браузер, ввести в адресной строке номер IP/gpio/1
- Посмотреть монитор порта, если к выходу GPIO2 подключен светодиод, он должен загореться.
NodeMCU на базе esp8266
 NodeMCU – это платформа, основанная на базе модуля esp8266. Используется для управления схемой на расстоянии при помощи интернета через Wi-Fi. Плата малогабаритная, компактная, стоит дешево, на лицевой стороне имеется разъем для USB. Рядом кнопки для отладки и перезагрузки микроконтроллера. Также установлен чип ESP8266. Напряжение питания – от 5 до 12 В, желательно подавать более 10 В.
NodeMCU – это платформа, основанная на базе модуля esp8266. Используется для управления схемой на расстоянии при помощи интернета через Wi-Fi. Плата малогабаритная, компактная, стоит дешево, на лицевой стороне имеется разъем для USB. Рядом кнопки для отладки и перезагрузки микроконтроллера. Также установлен чип ESP8266. Напряжение питания – от 5 до 12 В, желательно подавать более 10 В.
Большим преимуществом платы является ее малое энергопотребление. Нередко их используют в схемах с автономным питанием. На плате расположены всего 11 портов общего назначения, из них некоторые имеют специальные функции:
- D1 и D2 – для интерфейса I2C/ TWI;
- D5-D8- для интерфейса SPI;
- D9, D10 – для UART;
- D1-D10 – могут работать как ШИМ.
Платформа имеет современное API для аппаратного ввода и вывода. Это позволяет сократить количество действий во время работы с оборудованием и при его настройке. С помощью прошивки NodeMCU можно задействовать весь рабочий потенциал для быстрой разработки устройства.
WeMos на базе esp8266
 WeMos – еще один вид платформы, основанный на базе микроконтроллера esp8266. Соответственно, имеется Wi-Fi модуль, поддерживается Arduino IDE, имеется разъем для внешней антенны. Плата имеет 11 цифровых входов/выходов, которые (кроме D0) поддерживают interrupt/pwm/I2C/one-wire. Максимальное напряжение питания достигает 3,3 В. Также на платформе присутствует USB разъем. Аналоговый вход 1 с максимальным напряжением 3,2В.
WeMos – еще один вид платформы, основанный на базе микроконтроллера esp8266. Соответственно, имеется Wi-Fi модуль, поддерживается Arduino IDE, имеется разъем для внешней антенны. Плата имеет 11 цифровых входов/выходов, которые (кроме D0) поддерживают interrupt/pwm/I2C/one-wire. Максимальное напряжение питания достигает 3,3 В. Также на платформе присутствует USB разъем. Аналоговый вход 1 с максимальным напряжением 3,2В.
Для работы с модулем нужно установить драйвер CH340 и настроить Ардуино IDE под ESP8266. Для этого нужно в меню настройки в строке «дополнительная ссылка для менеджера плат» добавить адрес http://arduino.esp8266.com/stable/package_esp8266com_index.json.
После этого требуется найти пакет esp8266 by ESP8266 и установить его. Затем нужно выбрать в меню инструменты микроконтроллер Wemos D1 R2 и записать нужный скетч.
Выводы по ESP8266
С помощью плат на основе микросхемы ESP8266 вы можете добавить в свои проекты возможности “большого интернета”, сделав их гораздо более интеллектуальными. Дистанционное управление, сбор и анализ данных на сервере, обработка голоса и работа с изображением – все это становится доступным, когда мы подключаем наш проект по WiFi к интернету. В следующих статьях мы подробно рассмотрим то, как можно программировать устройства на базе esp8266, а также уделим внимание таким популярным платам как WeMos и NodeMcu.
RC машинка может быть WiFi машинкой...?
RC машинка это хорошо, но дешевые RC машинки имеют ограниченный диапазон и управляются только определённым пультом поставляемым в комплекте.
Я купил RC джип 4х4 с гибкой подвеской и внедорожными шинами примерно за 30 долларов. Поигравшись с машинкой я решил, что её можно улучшить при помощи Wi-Fi и Android. Потратив немного времени, я полностью удалил плату из машинки. Я замерял напряжения на этой плате и разработал систему управления двигателем при помощи Arduino. Оригинальная система управления не использует ШИМ для контроля скорости. Машинка рассчитана на переезд через препятствия на очень низкой передаче, и как следствие очень медленно. В моей же схеме используется ШИМ.
Я использую Arduino уже несколько месяцев. Я также приобрел asynclabs WiFi Sheild для Duemilanoe Arduino, чтобы экспериментировать с WiFI. Он поставляется с библиотекой, устанавливаемой в Arduino IDE. Я смог сделать программу, которая позволяет управлять двигателями и направлением движения при помощи WiFi.
При помощи Visual Studio я разработал окно программы, которая подключается к серверу автомобиля и дает ему команды. Затем после нескольких попыток я написал приложение для Android, которое использует акселерометр для управления машинкой.
Инструменты и элементы
Это общий список инструментов и элементов, которые использовались в этом проекте. В документации Eagle указаны точные технические характеристики используемых компонентов.

Мультиметр
Паяльник
Припой
Отвертки
Раствор для травления плат
Фольгированый стеклотекстолит
Плоскогубцы
Arduino
AsyncLabs WiFi Sheild
Разъёмы RJ45
Драйвер двигателя с H-мостом
Конденсаторы

Драйвер двигателей

Используя Eagle, я разработал эту схему и сделал печатную плату для неё. Она функционирует как драйвер двигателей и регулятор их мощности для Arduino.
Это позволяет использовать стандартный 7.2В аккумулятор для питания основных и рулевых двигателей и Arduino.
В этой схеме используется двойной интегральный драйвер с Н-мостом SN754410 для управления двигателями. Выводы управления драйвера подсоединены к кабелю RJ45, который подключается к AsyncLabs WiFi Sheild.
Arduino Shield

Используя библиотеку SparkFun в Eagle я разработал Arduino Shield, через который будут проходить контакты с WiFi Shield и подключаться к драйверу двигателя через разъем RJ45 и 2 винтовые клеммы.
Цоколевка контактов RJ45 очень важна. Ошибка в подключении может привести к непредсказуемым результатам и придётся переделывать плату.
Травление печатных плат
Эта тема была раскрыта много раз, и я не буду подробно описывать её.
Я использую , и он меня устраивает, а с опытом дает прекрасные результаты.
Для крепления платы к корпусу использовались липучки. Мне повезло, т.к. в моей машинке было много места для электроники под трубчатым каркасом.
Я забыл сфотографировать соединение платы драйвера двигателя с остальными платами, однако он хорошо стал и не занял много места в корпусе.

Программа
Мой код может быть не достаточно эффективен, но он работает.
Машинка
Мне удалось собрать CarServer на основе примера SocketServer, который я получил вместе с Wifi Sheild AsynLabs.
Вам необходимо будет ввести информацию о своей беспроводной сети в код Arduino. Когда машина включилась, дайте ей 15-45 секунд, чтобы установить соединение с маршрутизатором. Красный светодиод на WiFi Shield означает, что соединение установлено.
Я сделал эту программу при помощи C # и MS Visual Studio 2008. Я сделал хорошее окно, и автомобилем можно управлять стрелочками.

Почему бы не управлять машинкой с телефона?
Такая мысль появилась у меня примерно через неделю после покупки DroidX. Я начал экспериментировать и в конечном итоге использовал Android SDK. Я нашел аналогичные приложения, где для управления используется акселерометр. Смотря на эти приложения написал свое.
Вставить IP и порт, указанные в коде Arduino. Держите телефон горизонтально. Затем наклоните его от себя, чтобы ехать вперед и на себя, чтобы ехать назад. Используйте телефон как руль.
Это мое первое крупное приложение для Android. В нем до сих пор есть некоторые ошибки, но в основном оно работает нормально.
Рулите во дворе машинкой 4x4 с WiFi!
Я отлично провел время, создавая этот проект. Я получил много знаний и новых навыков, и теперь у меня есть машинка 4х4, которой можно управлять с телефона.
Мне нужна камера для установки за лобовым стеклом, чтобы смотреть куда ехать. Она должна быть с низким энергопотреблением, а также передавать видео сама по себе. (Я думаю, что Arduino справится с этим).

Список радиоэлементов
| Обозначение | Тип | Номинал | Количество | Примечание | Магазин | Мой блокнот | |
|---|---|---|---|---|---|---|---|
| Драйвер двигателей | |||||||
| IC1 | Микросхема | SN754410 | 1 | В блокнот | |||
| Линейный регулятор | 5 В | 1 | В блокнот | ||||
| Биполярный транзистор | 2N3904 | 1 | В блокнот | ||||
| C1, C2 | Электролитический конденсатор | 2 | В блокнот | ||||
| Разьем | 2 вывода | 7 | В блокнот | ||||
| Разьем | 8 выводов | 1 | В блокнот | ||||
| Arduino Shield | |||||||
| U1 | Плата Arduino | 1 | В блокнот | ||||
| Т1 | Биполярный транзистор | 2N3904 | 1 | В блокнот | |||
| R1 | Резистор | 1 | В блокнот | ||||
| U$3 | Подстроечный резистор | 1 | В блокнот | ||||
| Разьем | 2 вывода | 2 | |||||